



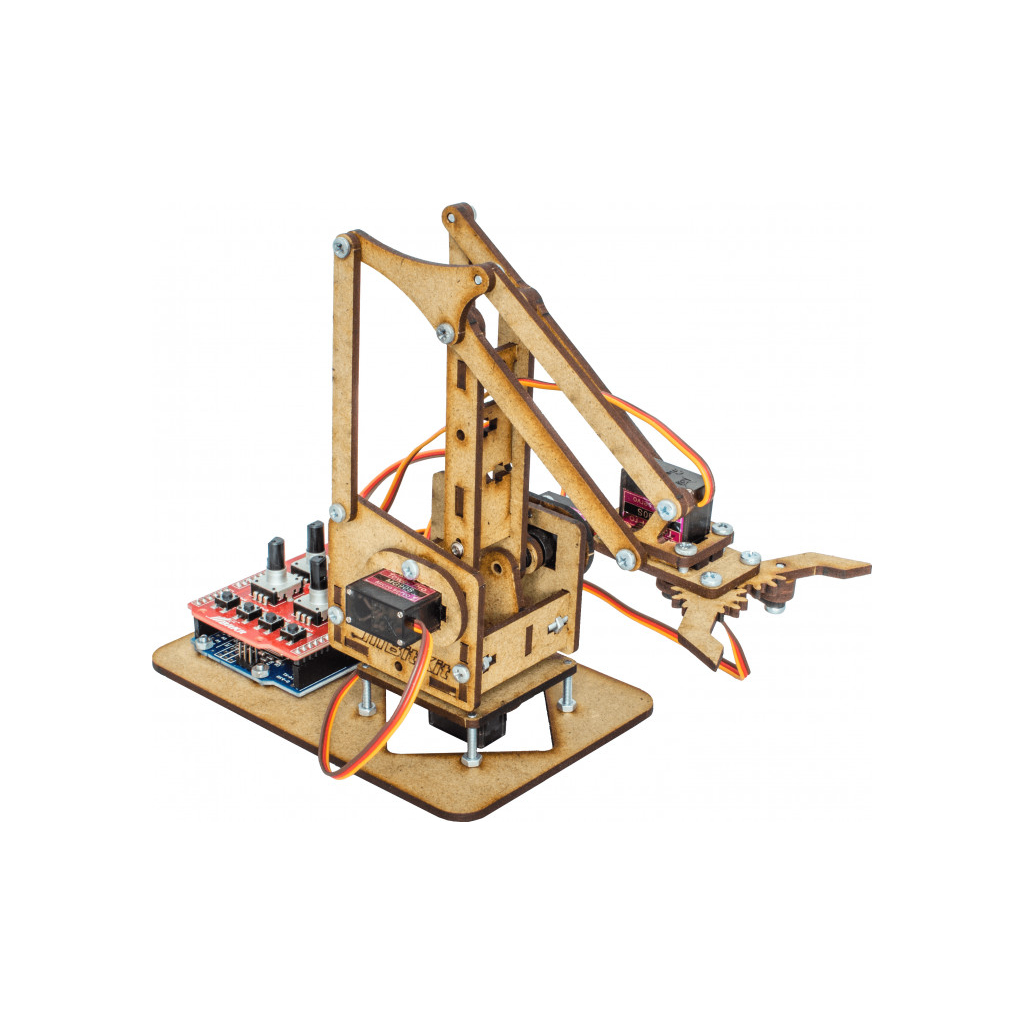

Робот-маніпулятор RobiT – іграшка з серії STEM. Це розумна розвага, яка допомагає дитині з задоволенням починати досліджувати відразу кілька наук – електромеханіку, механіку, системи автоматичного управління, робототехніку, інформатику.
Збирати конструктор цікаво і просто – докладна інструкція із зображенням елементів, крок за кроком демонструє весь процес, який складається з кількох етапів:
- збірка механічної частини
- підключення електроніки
- завантаження програми в пам’ять контролера за допомогою комп’ютера
Після успішного виконання всіх дій і підключення зібраної моделі до джерела живлення, RobiT подасть перші ознаки “життя” миготливим світлодіодом на платі і поворотом маніпулятора в вихідну позицію.
Тепер він готовий виконувати інструкції які будуть завантажені в пам’ять контролера.
Для перших експериментів ми розробили кілька бібліотек, які продемонструють основні можливості конструктора:
BitKit_Shield – необхідна для початкового підключення маніпулятора і перевірки електроніки. З її допомогою виконуються прості команди. При натисканні кнопок SW1-SW4 світлодіоди блимають з різною швидкістю і повністю відключаються.
Handle_Manipulator – використовується для ручного управління маніпулятором. Регулятори ENC 1-4 встановлюють машину в різні положення.
Manipulator_RepeaterPosition. У режимі використання цієї бібліотеки за допомогою кнопки SW1 запам’ятовується поточний стан. Відтворює контролер ці положення за допомогою кнопки SW2. Всього можна запам’ятати до 10 положень маніпулятора. Для того щоб скинути все збереження і почати створювати нову послідовність, необхідно натиснути кнопку SW3.
Завдяки цим бібліотекам Ви отримаєте загальне уявлення про те, як працює RobiT, але це тільки початок! Мета цих прикладів, пробудити в дитині інтерес до самонавчання і бажання самостійно навчити робота чомусь новому, втілити свою ідею в життя, адже тут стільки можливостей для фантазії.
- Жанр
- Вид транспорту
- Вік
- Додатково
- Стать
- Тип
- Кількість деталей
Конструктор BitKit RobiT робот-маніпулятор (BK0007)
Робот-маніпулятор RobiT – іграшка з серії STEM. Це розумна розвага, яка допомагає дитині з задоволенням починати досліджувати відразу кілька наук – електромеханіку, механіку, системи автоматичного управління, робототехніку, інформатику.
Збирати конструктор цікаво і просто – докладна інструкція із зображенням елементів, крок за кроком демонструє весь процес, який складається з кількох етапів:
- збірка механічної частини
- підключення електроніки
- завантаження програми в пам’ять контролера за допомогою комп’ютера
Після успішного виконання всіх дій і підключення зібраної моделі до джерела живлення, RobiT подасть перші ознаки “життя” миготливим світлодіодом на платі і поворотом маніпулятора в вихідну позицію.
Тепер він готовий виконувати інструкції які будуть завантажені в пам’ять контролера.
Для перших експериментів ми розробили кілька бібліотек, які продемонструють основні можливості конструктора:
BitKit_Shield – необхідна для початкового підключення маніпулятора і перевірки електроніки. З її допомогою виконуються прості команди. При натисканні кнопок SW1-SW4 світлодіоди блимають з різною швидкістю і повністю відключаються.
Handle_Manipulator – використовується для ручного управління маніпулятором. Регулятори ENC 1-4 встановлюють машину в різні положення.
Manipulator_RepeaterPosition. У режимі використання цієї бібліотеки за допомогою кнопки SW1 запам’ятовується поточний стан. Відтворює контролер ці положення за допомогою кнопки SW2. Всього можна запам’ятати до 10 положень маніпулятора. Для того щоб скинути все збереження і почати створювати нову послідовність, необхідно натиснути кнопку SW3.
Завдяки цим бібліотекам Ви отримаєте загальне уявлення про те, як працює RobiT, але це тільки початок! Мета цих прикладів, пробудити в дитині інтерес до самонавчання і бажання самостійно навчити робота чомусь новому, втілити свою ідею в життя, адже тут стільки можливостей для фантазії.
- Жанр
- Вид транспорту
- Вік
- Додатково
- Стать
- Тип
- Кількість деталей